多目标规划
multiple objectives programming
数学规划 的一个分支。研究多于一个目标函数在给定区域上的最优化。又称多目标最优化。通常记为 VMP。在很多实际问题中,例如经济、管理、军事、科学和工程设计等领域,衡量
 多目标规划
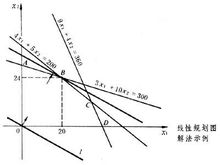
一个方案的好坏往往难以用一个指标来判断,而需要用多个目标来比较,而 这些目标有时不甚协调,甚至是矛盾的。因此有许多学者致力于这方面的研究。1896年法国经济学家 V.帕雷托最早研究不可比较目标的优化问题 ,之后,J.冯·诺伊曼 、H.W.库恩、A.W.塔克尔、A.M.日夫里翁等数学家做了深入的探讨,但是尚未有一个完全令人满意的定义。求解多目标规划的方法大体上有以下几种:一种是化多为少的方法 , 即把多目标 化为比较容易求解的单目标或双目标,如主要目标法、线性加权法、理想点法等;另一种叫分层序列法,即把目标按其重要性给出一个序列,每次都在前一目标最优解集内求下一个目标最优解,直到求出共同的最优解。对多目标的线性规划除以上方法外还可以适当修正单纯形法来求解;还有一种称为层次分析法,是由美国运筹 学家沙旦于70年代提出的,这是一种定性与定量相结合的多目标决策与分析方法,对于目标结构复杂且缺乏必要的数据的情况更为实用。
多目标规划
一个方案的好坏往往难以用一个指标来判断,而需要用多个目标来比较,而 这些目标有时不甚协调,甚至是矛盾的。因此有许多学者致力于这方面的研究。1896年法国经济学家 V.帕雷托最早研究不可比较目标的优化问题 ,之后,J.冯·诺伊曼 、H.W.库恩、A.W.塔克尔、A.M.日夫里翁等数学家做了深入的探讨,但是尚未有一个完全令人满意的定义。求解多目标规划的方法大体上有以下几种:一种是化多为少的方法 , 即把多目标 化为比较容易求解的单目标或双目标,如主要目标法、线性加权法、理想点法等;另一种叫分层序列法,即把目标按其重要性给出一个序列,每次都在前一目标最优解集内求下一个目标最优解,直到求出共同的最优解。对多目标的线性规划除以上方法外还可以适当修正单纯形法来求解;还有一种称为层次分析法,是由美国运筹 学家沙旦于70年代提出的,这是一种定性与定量相结合的多目标决策与分析方法,对于目标结构复杂且缺乏必要的数据的情况更为实用。
多目标规划